Full source code for both the model training and the Godot project is available on GitHub and is available for use under the MIT License. https://github.com/JosephCatrambone/GodotGestureRecognition
*Pure INFERENCE, though perhaps not ‘Pure Godot’. While everything here could certainly be done manually in-engine, we’re going to be building a few things for training in PyTorch and maybe even a dash of Rust when it’s convenient, but nevertheless the recognition happens with no external libraries and no FFI overhead. This approach also generalizes trivially to any engine.
Twenty-one years ago, Lionhead Studios released Black and White to the world — a ‘god game’ where the player presides over their worshippers, interacts with their avatar, and tries to defeat a rival deity called ‘Nemesis’. It’s a game with immersive visuals, cleverly executed animal AI, and, key to our discussion today, little to no obtrusive user interface.
One of the things that stuck with me most about this game was the gesture control system. To cast spells, a player would trace out one of a set of symbols with their cursor. If recognized, the game would play a satisfying chime and the cast spell would rush into the hand alongside some nice particle effects. It was an elegant system well befitting a low-speed, minimal-UI game — no numbers to peek at on a keyboard and no inventory to pop in front. To my younger self, there was something about waving one’s hands to cast spells that was, fittingly, magical. We’re going to be building a similar gesture recognition system from end-to-end. While the target here is the Godot Engine, this approach is general enough to be used absolutely anywhere.
- Defining a problem
- Choosing a technique
- Template matching
- More template matching
- Objective paths
- Neural networks
- Mr. Makematcher: Make me a matcher
- Deciding on an architecture
- Defining and training
- Exporting a model (as Rust and as a matrix)
- Making training data – building a tool in Rust with egui
- Building a matrix library in Godot and “loading” our model
- From ‘mouse gesture’ to ‘action’
Defining the Problem
We have a series of squiggles with the mouse that we want to map to one of many possible gestures. Let’s decide on a few things we need for this system:
- First, gestures should be scale and affine invariant. Whether a player draws a symbol really small and compact or filling the full frame, we shouldn’t care. Rotation shouldn’t impact the recognition of a symbol. We might revisit this later if we want to care about flips and mirrors.
- A gesture indicates volition. If a player has to retry a gesture a bunch of times to get something to work, it’s frustrating. Whatever system we have should be robust to this. Ideally, we should also strive to have the lowest possible latency between the player action and real feedback.
- Adding gestures shouldn’t be a pain in the ass, but if forced to choose between an easy system that needs to get retrained every time and a hard system that’s general, we should start with the easy one.
- If it doesn’t add extra complexity, it would be useful to know how “close” a gesture is to every possible gesture archetype so that we can do neat things like ‘mixing’ gestures together.
Choosing a Technique
Immediately, there are four possibilities that spring to mind:
Template Matching
We can try matching templates, where we take a stroke and project each of the points to the nearest line segments. This technique is simple, sample the player’s stroke at a few key points and measure the distance to a template line. Sum the point-to-line projection distances and pick the template with the lowest (normalized) error.
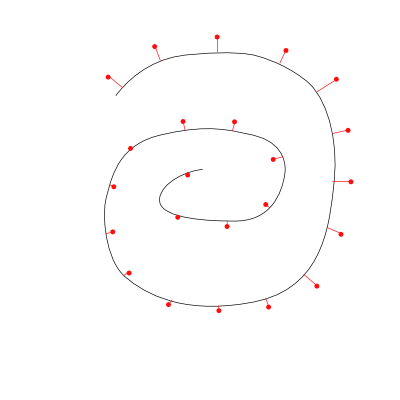
Advantages to this system: it can be really fast to recognize a gesture, depending on the number of segments in your templates. One needs either to perform a distance calculation for every step in the player’s stroke to every point in the target template or to make a data-structure to simplify this calculation (like a quadtree).
Disadvantages to this system: rotation doesn’t come for free. Directional information is not available, so a left-to-right stroke cannot be differentiated from a right-to-left-stroke. If not properly optimized, the O(n^2) match can easily cause jitters and performance problems. Defining new gestures can be a pain in the butt.
Template Matching, but Different
Rather than project a bunch of points along the player’s stroke to some pre-defined dots, we make a greyscale ‘heatmap’ of our target gestures. When performing our checks, we rasterize our player’s stroke to an image and check how much of it falls inside a template or outside of a template. If I’m being honest, this is the approach that we _should_ be using for this project, but I’m skipping over it because I want to do something else.
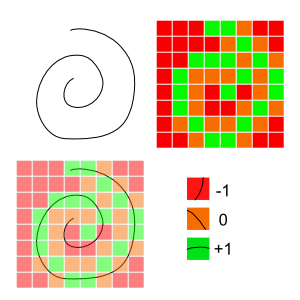
Advantages: This is among the simplest systems to build. It’s quick, elegant, and fairly robust. It also requires no specialized tooling to make the templates: We can generate them by making a square image with a black background and repeatedly drawing over it with a low-opacity white brush to build up the most frequently trodden areas.
Disadvantages: Like most others, we have no sense of left-to-right versus right-to-left. Picking the right granularity of heatmap is really important. One needs to be careful to normalize the maps between different gestures to avoid confusion. Imagine a pure white block: this would always be counted as the best match because every region the player’s gesture/sketch could intersect is part of the valid symbols.
Series of Waypoints
Instead of matching the player’s gesture to a template, we can define certain success and failure criteria for a gesture to be matched. For example, a “spiral” gesture is defined as, “A player must move their cursor to within 100 pixels of the next target waypoint AND it must NOT be within 100 pixels of this other waypoint.” This even allows us to build a nice tree of detections:
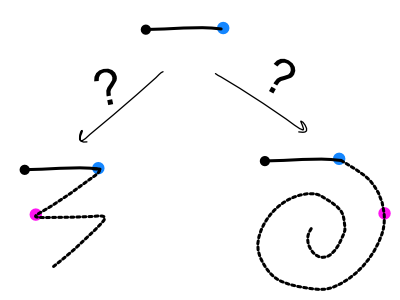
Advantages: include being able to separate a left-to-right gesture from a right-to-left gesture and having a relatively compact memory/CPU footprint. At any given point we’re only checking to see if the player is at least some distance away from the last waypoint and at least some distance towards one of the next waypoints.
Disadvantages: much like the previous approach, one needs to define data in a special format rather than just drawing
The Overcomplicated Neural Network Approach
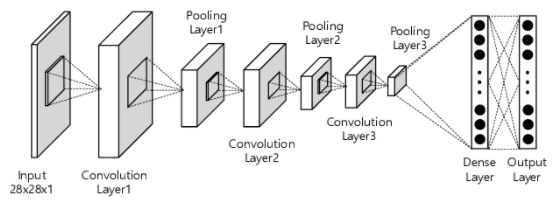
Lastly, we can define neural network — something like the ones used to recognize handwritten digits for the MNIST challenge. This also has a dozen different choices that we can make internally, like, “Do we want the network to be convolutional or dense?” “Do we want to create an embedding space or do we want to just go straight into classification?” “Do we want to export our model as ONNX or try something else?”
Advantages: Labyrinths Neural networks are awesome! Depending on our architecture of choice, we get the ability to automatically add new gestures at runtime. Among the most robust of detectors, depending on how you do it. No special tools required to make training data, though it can be helpful if you have them.
Disadvantages: Training is error prone. Lots of flexibility means lots of decisions and choices off the bat. The detection process can be slow at runtime, depending on your architecture.
We’re going to go with the neural network approach because it’s neat and gives us the chance to do more fun things later.
Deciding on an Architecture
While data science best practices ask that we build an experimental design document first, we are instead going to throw caution to the wind and just decide on an architecture. MNIST digit recognition would have us use convolutional networks because they’re memory efficient, quite fast, and exceptionally performant, but they require that we implement convolutions:
On the other hand, a network of dense layers is much simpler to implement, theoretically more performant (because of the greater number of weights for a given input size), and has lots of ready-made solutions available. Fully connected networks ahoy!
This brings us to our next important decision: should we train a classifier or an embedding model?
A classifier takes an image and spits out a probability distribution. If we have three gestures, ‘star’, ‘spiral’, and ‘wave’, then an output might be: ‘star’: 10%, ‘spiral’: 75%, ‘wave’: 15%. We don’t have to do much or any post-processing after we perform an inference, but adding a new gesture means we need to retrain our entire model.
An embedding model (or ‘encoder’) takes a grayscale image of size n by n and creates an ’embedding’ of size k, where ideally k is much smaller than n. We might have a 32×32 image (1024 values, or ‘1024-dimensional’) that gets embedded in a 10-dimensional latent space. Ideally, images that are visually similar should end up in similar places in the latent space. Imagine a map of a grocery store from the top. You might have a canned goods section, a frozen foods section, produce, a bread aisle, and so on, but the map is two-dimensional. Now imagine you take a really high resolution photo of a can of soup. If you knew where the canned goods aisle was, you could represent that huge 8192×8192 image with only two digits, the x coordinate and the y coordinate, rather than 67108864 (8192*8192) values. Of course, this is a lossy process, but the thing we care about is that similar images get grouped together. Getting a good universal gesture embedding requires lots of training data, so this approach is probably a bad idea, but I’m going to do it anyway because if it works we can basically add arbitrary gestures without retraining the model at all.
For our purposes, the only difference between a classifier and an encoder is the training, so we can punt on that detail for now and get right into defining our model:
torch.nn.Sequential(
torch.nn.Flatten(),
torch.nn.Linear(in_features=width*height, out_features=256),
torch.nn.LeakyReLU(inplace=True),
torch.nn.Linear(256, 128),
torch.nn.LeakyReLU(inplace=True),
torch.nn.Linear(128, 32),
torch.nn.LeakyReLU(inplace=True),
torch.nn.Linear(32, embedding_size),
# No activation on last layer
)That’s it! That defines our whole model — four layers and some activations. We’re using PyTorch and Python to train it, but the final implementation and runtime will be in pure GDScript and can easily be implemented in JavaScript or Rust or whatever language. For the training process, we take a bunch of images and run them all through this encoder to get the latent representation, then we compare the latent representations. For each pair of images in the pass, we check to see if they’re in the same class. If they are, we penalize the encoder for making their embeddings dissimilar and reward it for making the embeddings more similar. After repeating this process a few thousand times, we get some pretty okay embeddings! The full code to train is as follows:
def train(training_data_directory):
model = build_model(32, 32, 10).to(DEVICE)
# Set up some rescaling and random flips to give us data augmentation, but don't add noise.
transforms = tvtf.Compose([
tvtf.Grayscale(),
tvtf.RandomHorizontalFlip(),
tvtf.RandomVerticalFlip(),
tvtf.RandomRotation(20),
tvtf.ToTensor(), # Converts 0,255 PIL -> 0.0,1.0 Tensor.
])
# Brace for run...
loss_fn = torch.nn.CosineEmbeddingLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=LEARNING_RATE)
dataset = torchvision.datasets.ImageFolder(training_data_directory, transform=transforms)
dataset_loader = torch.utils.data.DataLoader(dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=NUM_WORKERS, pin_memory=True)
# Training loop:
for epoch_idx in range(EPOCHS):
dataloop = tqdm(dataset_loader)
total_epoch_loss = 0.0
for batch_idx, (data, targets) in enumerate(dataloop):
data = data.to(device=DEVICE)
optimizer.zero_grad()
# Forward
embeddings = model(data)
# One embedding gives us n*(n-1) pairs of datapoints.
# We rely on the batch being shuffled and having some of each class, but if the entire batch is unlucky
# and we have all one class, it will be okay.
# left takes [1, 2, 3, 4] and goes to [1, 1, 1, 1, 2, 2, 2, 2, 3, 3, 3, 3, 4, 4, 4, 4]
# right takes [1, 2, 3, 4] and goes to [1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4, 1, 2, 3, 4]
left = torch.repeat_interleave(embeddings, embeddings.shape[0], axis=0)
right = embeddings.repeat(embeddings.shape[0], 1)
truth = list()
for label_left in targets:
for label_right in targets:
truth.append(1.0 if label_left == label_right else -1.0)
truth = torch.tensor(truth).to(DEVICE)
# Embedding pairs are 1 if they're the same and -1 if they're not.
# We match up embeddings based on their classes.
loss = loss_fn(left, right, truth)
# Backward
loss.backward()
optimizer.step()
# Log status.
total_epoch_loss += loss.item()
print(f"Total epoch loss: {total_epoch_loss}")
torch.save(model.state_dict(), f"checkpoints/checkpoint_{epoch_idx}")
torch.save(model, "result_model.pt")Using PyTorch means we can utilize a GPU to accelerate training, so our runs will be measured in seconds or minutes instead of hours or days. Our final step them is to take the trained model and make it a little easier to use in Godot. A dense layer (or linear layer, as it’s called in PyTorch) is nothing more than a matrix multiply and a bias add. y = mx + b (Hence, linear.) So all we need to do is write the weight matrices and biases to a JSON file and we’re done:
def save_model_to_json(model):
result_model = dict()
result_model['description'] = model.__str__()
result_model['weights'] = list()
result_model['biases'] = list()
result_model['shapes'] = list()
for layer_idx in range(len(model)):
for param_idx, param in enumerate(model[layer_idx].parameters()):
weight_or_bias = param.to('cpu').detach().numpy().T
if len(weight_or_bias.shape) == 1:
result_model['biases'].append([float(x) for x in weight_or_bias.flatten()])
else:
result_model['weights'].append([float(x) for x in weight_or_bias.flatten()])
result_model['shapes'].append(weight_or_bias.shape)
with open("result_model.json", 'wt') as fout:
json.dump(result_model, fout)Easy peasy. If we had gone with a more complicated architecture we might consider instead using a different format for model export. I’m personally a fan of ONNX because it’s easy to use and fairly widely supported. The downside is we need to build an external library. We might do this in a future post.
Making Training Data
As a digression, we need lots of training gestures to get a robust embedding. We can draw these in a 32×32 image in MSPaint and save all the files, but that process is slow and boring. I wrote a tool in Rust that lets a person rapidly save a bunch of perfectly cropped, perfectly formatted sample data. The full source is here: https://github.com/JosephCatrambone/MakeGestureDataset
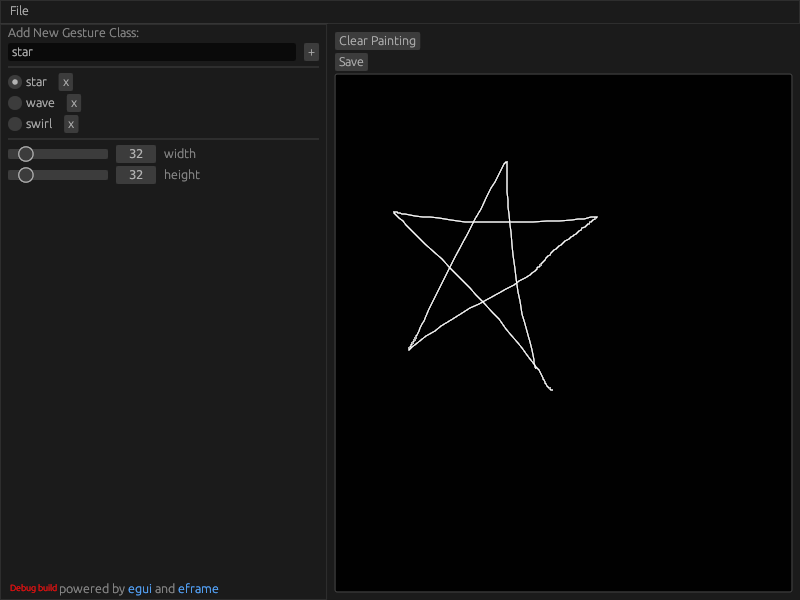
Needed a tool to make a dataset for recognizing gestures/drawings. Hammered a simple one out in #Rust and egui. Took about 20 minutes. pic.twitter.com/yRyihoRXZl
— Joseph Catrambone (@JCatrambone) February 18, 2022
Implementing Dense Networks in Godot with GDScript
The moment we’ve been waiting for. Like we mentioned above, dense layers are just matrix multiplications and additions. Godot lacks a general matrix class, but fortunately it’s trivial to write one. The only methods we need are matmul and add. Subtract and sum are nice to have, but not required. Let’s assume we have a matrix multiply class (which I’m splitting off to a separate repository for space reasons) and we want to load our model from the JSON file. That, it turns out, is trivial:
class_name SequentialModel
extends Resource
var weights:Array[NDArray] = []
var biases:Array[NDArray] = []
func _init(json_model_data:String):
var json = JSON.new()
json.parse(json_model_data)
var model_data = json.get_data()
for idx in range(0, len(model_data['weights'])): # Can't zip, so...
var shape:Array[int] = model_data['shapes'][idx]
var w:Array[float] = model_data['weights'][idx]
var b:Array[float] = model_data['biases'][idx]
var new_weight = NDArray.new(shape[0], shape[1])
new_weight.data = w
var new_bias = NDArray.new(1, shape[1])
new_bias.data = b
weights.append(new_weight)
biases.append(new_bias)
func predict(data:Array[float]):
var x = NDArray.new(1, len(data))
x.data = data
for idx in range(len(self.weights)):
x = x.matmul(self.weights[idx])
if idx != len(self.weights)-1:
x = x.leaky_relu()
return x
And finally, we can utilize this method by converting a gesture into a 32×32 image, flattening it, and sending it to our predict method to get the embedding. We then check the embedding against our known embeddings and pick the closest one. We’re done!
There’s still room to improve: for one, there’s a lot of latency when we do the matrix multiply in GDScript. We also don’t know how well this will generalize to dozens of gestures and how robust it is to noise, but all things considered I’m happy with the result.
That’s all. The full source for the training, Godot project, and labeled data tool are all available on GitHub.